Autonomous-Vehicle-Drive
A vehicle designed from scratch and driven autonomously using a MLP.
Methods/Hardware used
- Multilayer Perceptron
- Sockets for live streaming
- Microcontroller (Arduino for transmitter and receiver)
- RF communication (nRf24L01+ for wirelessly controlling the bot)
- CPU on the bot(Raspberry pi 3 and camera for video capturing)
File description
Directory - /RcDriveTest
rc_control_test.py- Control the car by your keyboard and test the RC car./arduino/rc_key_controller- Arduino Controller using Uno and a nRF24L01+./arduino/rc_keyboard_bot- Bot code.
Images
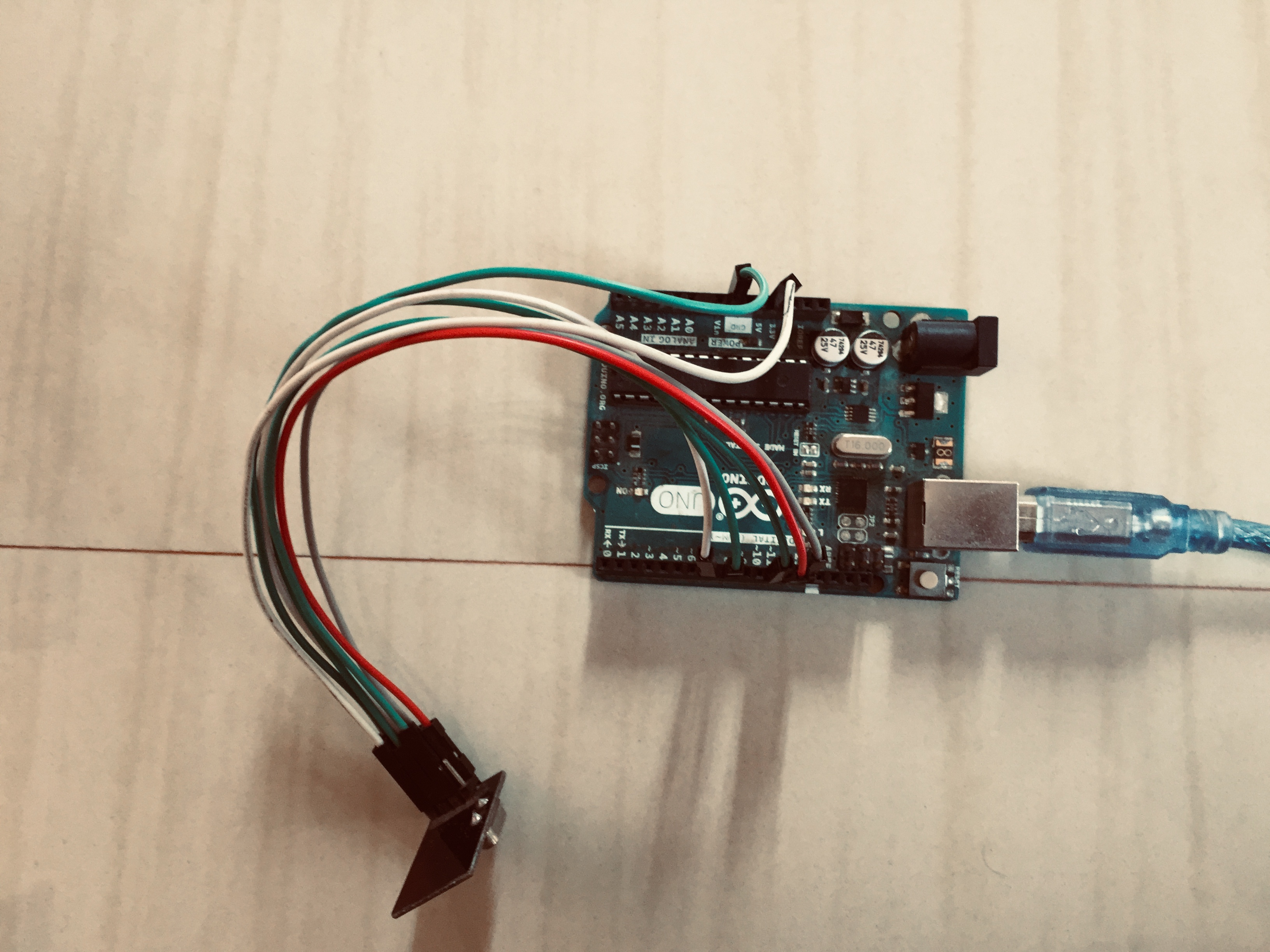
- The remote (Ver 1.0):-
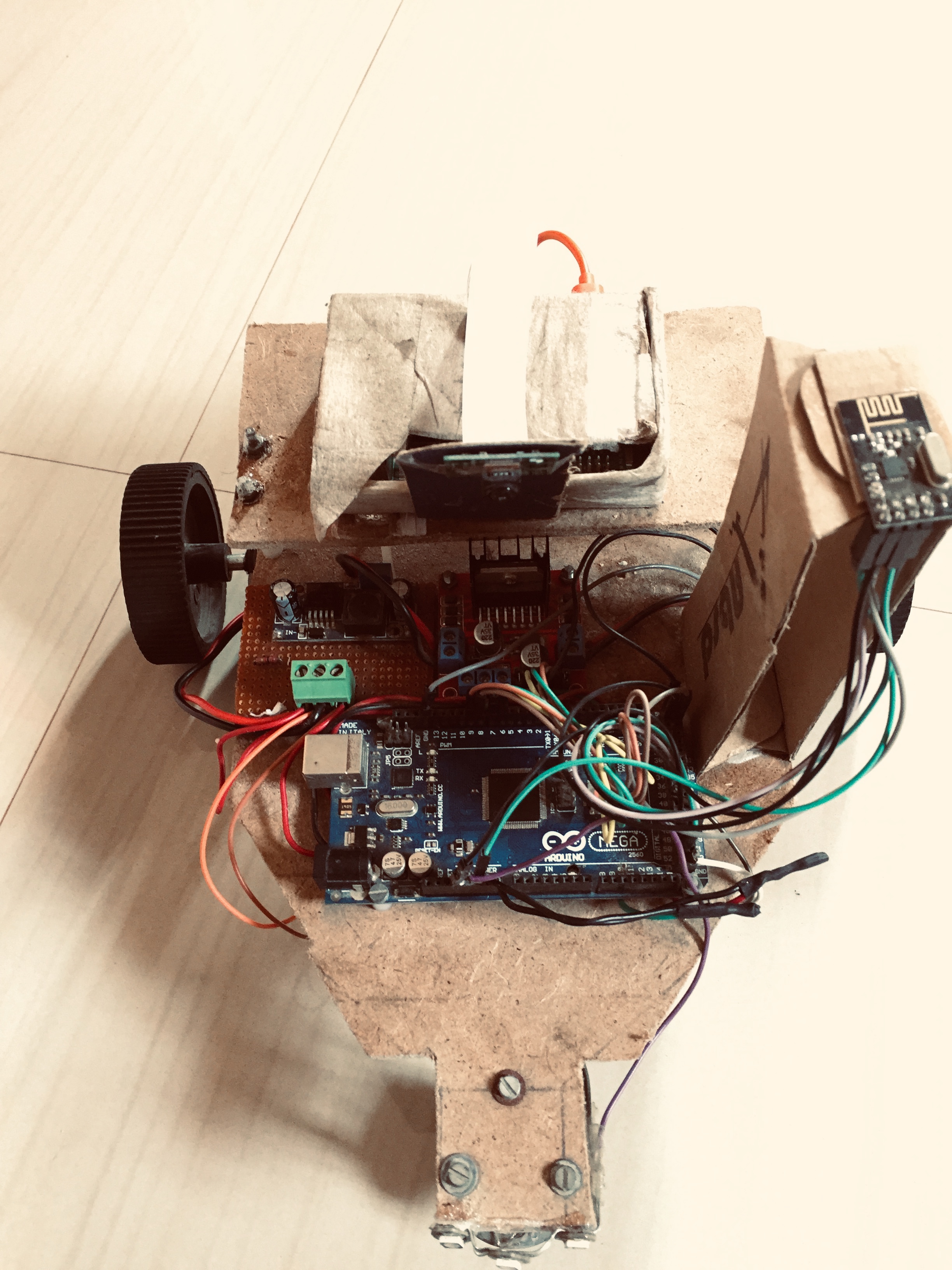
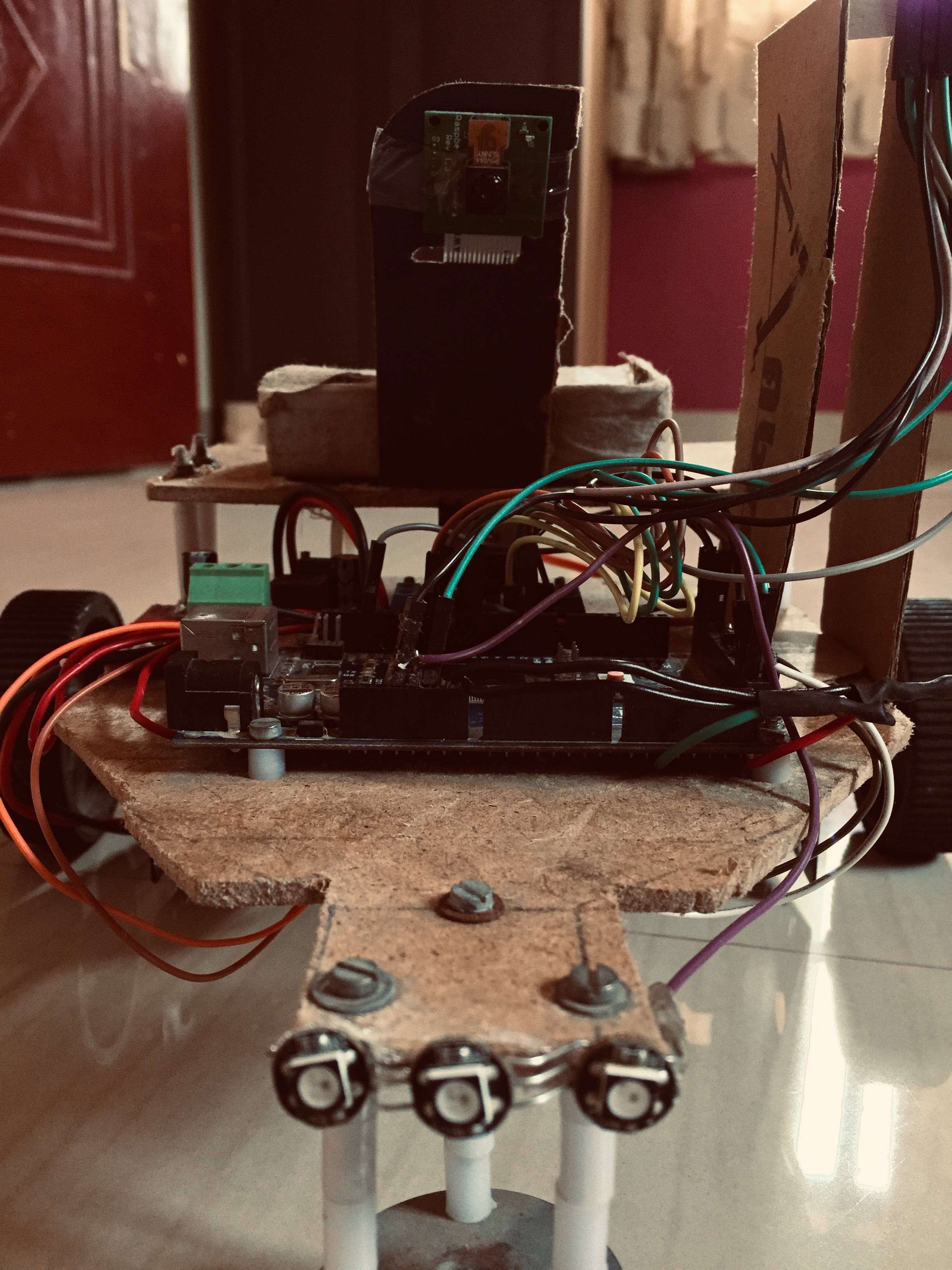
- The bot (Ver 1.0):-
| Top | Front |
|---|---|
 |
 |